Большинство роботов-гуманоидов берут предметы руками. Но мы, люди, используем для этого грудь, бедра и плечи, особенно, если несем что-то громоздкое. Новый мягкий робот от японской компании Toyota также задействует различные части своего тела, когда выполняет задание.
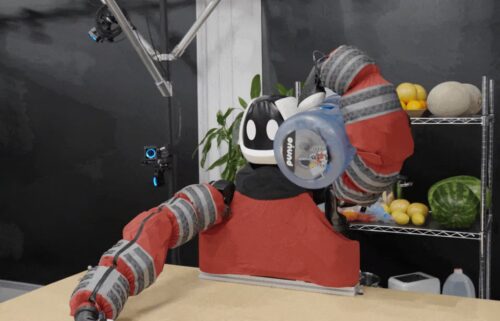
Робототехники из Исследовательского института Toyota (Toyota Research Institute) одели гуманоида Пуньо (Punyo) в нечто вроде большого полосатого свитера. Он сделан из цепких материалов, которые создают мягкий, податливый слой поверх твердого металлического скелета робота. А ткань наполнена тактильными датчиками, которые позволяют Пуньо безошибочно чувствовать, что именно он берет в руки. Следует добавить, что этот трогательный робот очень любит обниматься.
Руки Пуньо заканчиваются надувными манипуляторами-подушечками, которые при необходимости деформируются. На их внутренней части есть контролируемый камерами точечный рисунок. Через эту систему робот-гуманоид получает информацию о предметах, которых он касается. А еще его руки имеют дополнительную мягкость благодаря массиву из 13 наполненных воздухом камер, простирающихся от плеча до запястья. Давление в них можно индивидуально регулировать для достижения оптимальной жесткости - в зависимости от того, какие действия выполняет робот.
С помощью телеуправления робототехники учат Пуньо манипулировать различными крупными объектами. Иногда он наклоняется вперед, прижимает предметы к груди и откидывается назад, чтобы поднять их. Также он умеет забросить большую бутыль с водой на плечо и удерживать ее, рассказало издание Новый Атлас.
На видео инженеры учат Пуньо носить и класть в шкаф плюшевого медведя, переносить кариматы, подушки-валики и коробки, бросать мяч, складывать белье в корзину и делать еще много других полезных вещей.
В сентябре в Toyota Research Institute продемонстрировали выдающийся прогресс в обучении других роботов. Им показали, как выполнять десятки различных кухонных задач, в частности, намазывать хлеб, чистить картофель, раскатывать тесто для пиццы и переворачивать блины лопаткой. С помощью системы обучения роботы овладели новыми знаниями и повторили все, что увидели.
На примере Пуньо инженеры используют такой же процесс, как и в случае с Пуньо обучение ИИно с добавленным элементом выбора переменных. Команда, например, определяет, насколько точно робот должен подражать движениям человека или насколько приоритетны скорость и эффективность в его работе.